A Stepper Motor or a step motor is a brushless, synchronous motor which divides a full rotation into a number of steps. Unlike a DC motor which rotates continuously when a fixed DC voltage is applied to it, a step motor rotates in discrete step angles. This means, that it converts electrical power into mechanical power. The stepper motors also differs in the way they are powered. Instead of an AC or a DC voltage, they are driven (usually) with pulses. Each pulse is translated into a degree of rotation. The Stepper Motors therefore are manufactured with steps per revolution of 12, 24, 72, 144, 180, and 200, resulting in stepping angles of 30, 15, 5, 2.5, 2, and 1.8 degrees per step. The stepper motor can be controlled with or without feedback.
Working of Stepper motor
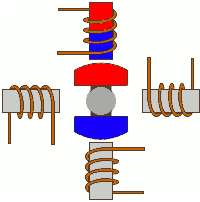
• There are 4 coils with 90o angle between each other fixed on the stator. The way that the coils are interconnected, will finally characterize the type of stepper motor connection, the coils are not connected together.
• The above motor has 90o rotation step. The coils are activated in a cyclic order, one by one. The rotation direction of the shaft is determined by the order that the coils are activated. The coils are energized in series, with about 1sec interval. The shaft rotates 90o each time the next coil is activated. Figure below shows the conduction of stepper motors.
Types of stepper motors
1. Permanent magnet stepper
2. Hybrid synchronous stepper
3. Variable reluctance stepper
Variable Reluctance Motors
• The variable reluctance motor in the illustration has four “stator pole sets” (A, B, A’, B’), set 15 degrees apart. Current applied to pole A through the motor winding causes a magnetic attraction that aligns the rotor (tooth) to pole A.
• Energizing stator pole B causes the rotor to rotate 15 degrees in alignment with pole B. This process will continue with pole A’ and back to A in a clockwise direction. Reversing the procedure (B’to A) would result in a counterclockwise rotation. Figure below shows the Variable Reluctance Motors.

Permanent Magnet Motors
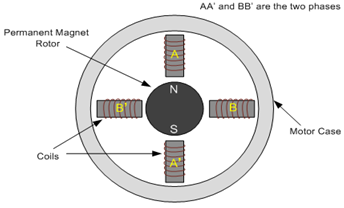
• The rotor and stator poles of a permanent magnet stepper are not teethed. Instead the rotor have alternative north and south poles parallel to the axis of the rotor shaft.
• When a stator is energized, it develops electromagnetic poles. The magnetic rotor aligns along the magnetic field of the stator. The other stator is then energized in the sequence so that the rotor moves and aligns itself to the new magnetic field. This way energizing the stators in a fixed sequence rotates the stepper motor by fixed angles. Figure below shows the Permanent Magnet Motors.
Hybrid Motors
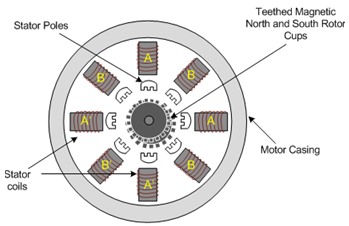
• They are constructed with multi-toothed stator poles and a permanent magnet rotor. Standard hybrid motors have 200 rotor teeth and rotate at 1.80 step angles. Other hybrid motors are available in 0.9ºand 3.6º step angle configurations. Because they exhibit high static and dynamic torque and run at very high step rates, hybrid motors are used in a wide variety of industrial applications
• A hybrid stepper is a combination of both permanent magnet and the variable reluctance. It has a magnetic teethed rotor which better guides magnetic flux to preferred location in the air gap.
• The magnetic rotor has two cups. One for north poles and second for the south poles. The rotor cups are designed so that that the north and south poles arrange in alternative manner. Figure below shows the Hybrid Motors.
A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical movements. The shaft or spindle of a stepper motor rotates in discrete step increments when electrical command pulses are applied to it in the proper sequence. The motors rotation has several direct relationships to these applied input pulses. The sequence of the applied pulses is directly related to the direction of motor shafts rotation. The speed of the motor shafts rotation is directly related to the frequency of the input pulses and the length of rotation is directly related to the number of input pulses applied
Advantages
• The rotation angle of the motor is proportional to the input pulse.
• The motor has full torque at stand- still (if the windings are energized)
• Precise positioning and repeat- ability of movement since good stepper motors have an accuracy of 3 – 5% of a step and this error is non cumulative from one step to the next.
• Excellent response to starting/ stopping/reversing.
• Very reliable since there are no con-tact brushes in the motor.Therefore the life of the motor is simply dependant on the life of the bearing.
• The motors response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
• It is possible to achieve very low speed synchronous rotation with a load that is directly coupled to the shaft.
• A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses
Disadvantages
• Resonances can occur if not properly controlled.
• Not easy to operate at extremely high speeds.
Open Loop Operation
One of the most significant advantages of a stepper motor is its ability to be accurately controlled in an open loop system. Open loop control means no feedback information about position is Needed. This type of control eliminates the need for expensive sensing and feedback devices such as optical encoders. Your position is known simply by keeping track of the input step pulses.
Stepper Motor Modes
Stepper motors is driven by waveforms which approximate to sinusoidal waveforms. There are three excitation modes commonly used with stepper motors: full-step, half-step and micro stepping.
Stepper Motor – Full-Step (Two Phases are on)
In full-step operation, the stepper motor steps through the normal step angle, e.g. with a 200 step/revolution the motor rotates 1.8° per full step, while in half-step operation the motor rotates 0.9° per full step. There are two kinds of full-step modes which are single-phase full-step excitation and dual-phase full-step excitation. In single-phase full-step excitation, the stepper motor operates with only one phase energized at a time. This mode is typically used in applications where torque and speed performances are less important, wherein the motor operates at a fixed speed and load conditions are well defined. Typically, stepper motors are used in full-step mode as replacements in existing motion systems, and not used in new developments. Problems with resonance can prohibit operation at some speeds. This mode requires the least amount of power from the drive power supply of any of the excitation modes. In dual-phase full-step excitation, the stepper motor operates with two phases energized at a time. This mode provides excellent torque and speed performance with minimal resonance problems.
Stepper Motor – Half-Step
Stepper motor half-step excitation mode alternates between single and dual-phase operations resulting in steps that are half the normal step size. Therefore, this mode provides twice the resolution. While the motor torque output varies on alternate steps, this is more than offset by the need to step through only half the angle. This mode had become the predominately used mode by Anaheim Automation beginning in the 1970’s, because it offers almost complete freedom from resonance issues. The stepper motor can operate over a wide range of speeds and drive almost any load commonly encountered. Although half-step drivers are still a popular and affordable choice, many newer micro stepping drivers are cost-effective alternatives. Anaheim Automation’s BLD75 series is a popular half-step driver and is suitable for a wide range of stepper motors. With this driver, the customer only needs a transformer, as the other power supply components are built into the driver itself
Stepper Motor – Micro stepping
In the stepper motor micro stepping mode, a stepper motor’s natural step angle can be partitioned into smaller angles. For example: a conventional 1.8 degree motor has 200 steps per revolution. If the motor is micro stepped with a ‘divide-by-10,’ then each micro step moves the motor 0.18 degrees, which becomes 2,000 steps per revolution. The micro steps are produced by proportioning the current in the two windings according to sine and cosine functions. This mode is widely used in applications requiring smoother motion or higher resolution. Typical micro step modes range from ‘divide-by-10’ to ‘divide-by-256’ (51,200 steps per revolution for a 1.8 degree motor). Some micro step drivers have a fixed divisor, while the more expensive micro step drivers provide for selectable divisors. For cost-effective micro step drivers.
There are three types of stepper motor
a) Variable reluctance motor
b) Permanent magnet stepper motor
c) Hybrid type.
Applications of Stepper motors
Stepper motors have become an essential component to applications in many different industries. The following is a list of industries making use of stepper motors:
- Aircraft – In the aircraft industry, stepper motors are used in aircraft instrumentations, antenna and sensing applications, and equipment scanning
• Automotive – The automotive industry implements stepper motors for applications concerning cruise control, sensing devices, and cameras. The military also utilizes stepper motors in their application of positioning antennas
• Chemical – The chemical industry makes use of stepper motors for mixing and sampling of materials. They also utilize stepper motor controllers with single and multi-axis stepper motors for equipment testing
• Consumer Electronics and Office Equipment – In the consumer electronics industry, stepper motors are widely used in digital cameras for focus and zoom functionality features. In office equipment, stepper motors are implemented in PC-based scanning equipment, data storage drives, optical disk drive driving mechanisms, printers, and scanners
• Gaming – In the gaming industry, stepper motors are widely used in applications like slot and lottery machines, wheel spinners, and even card shufflers
• Industrial – In the industrial industry, stepper motors are used in automotive gauges, machine tooling with single and multi-axis stepper motor controllers, and retrofit kits which make use of stepper motor controllers as well. Stepper motors can also be found in CNC machine control
• Medical – In the medical industry, stepper motors are utilized in medical scanners, microscopic or nanoscopic motion control of automated devices, dispensing pumps, and chromatograph auto-injectors. Stepper motors are also found inside digital dental photography (X-RAY), fluid pumps, respirators, and blood analysis machinery, centrifuge
• Scientific Instruments –Scientific equipment implement stepper motors in the positioning of an observatory telescope, spectrographs, and centrifuge
• Surveillance Systems – Stepper motors are used in camera surveillance